
Projects
Emergent Communication Using Deep RL
Effective communication enables agents to collaborate to achieve a goal. Understanding the process of how communication emerges allows us to create optimal learning environments for multi-agent settings. In the studies below, we assess emergence of communication between RL agents in a temporally interactive, cooperative task of navigating a gridworld environment. We find that, with situated communication, agents converge on a shared communication protocol more quickly, while the acting agent learns to solicit information sparingly, in line with the Gricean maxim of quantity. Our findings point towards the importance of studying language emergence through situated communication in multi-step interactions.
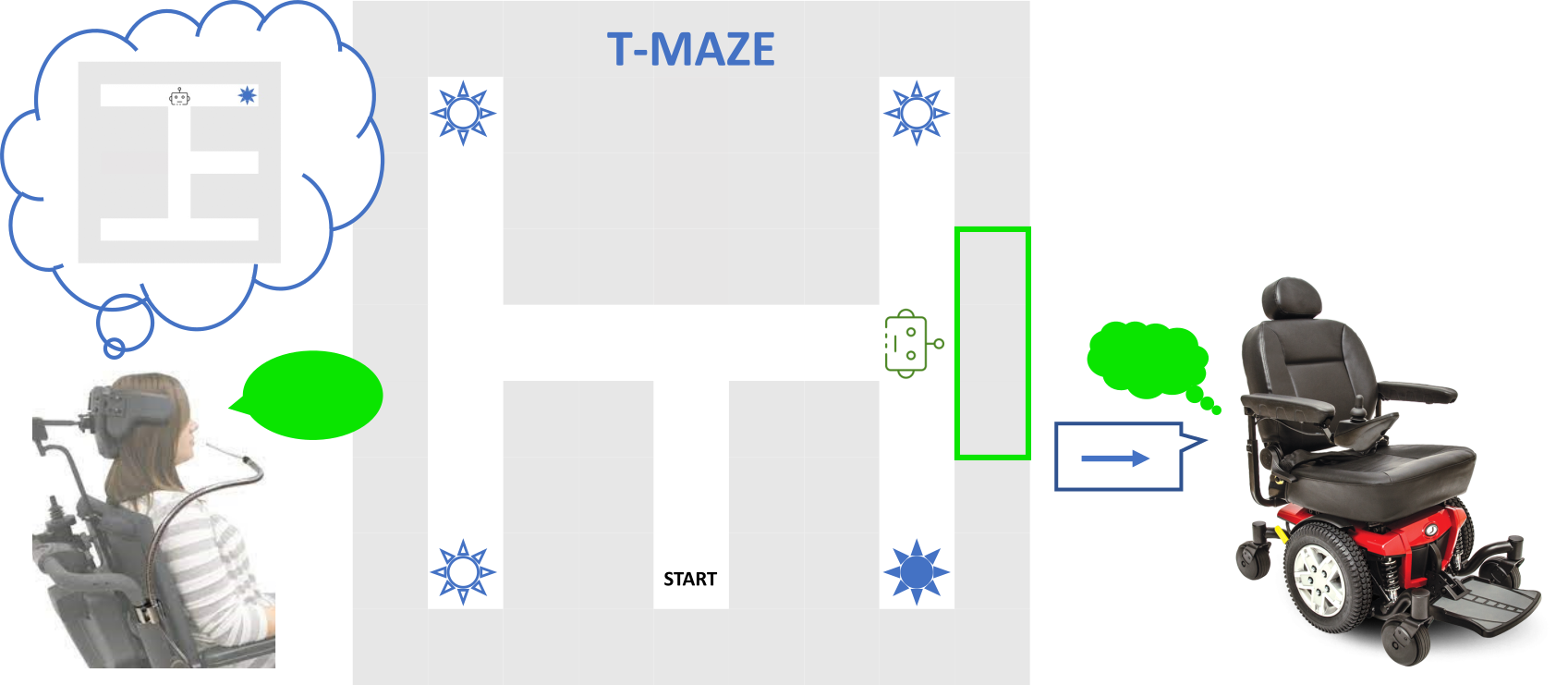
Over-communicate no more: Situated agents learn concise communication protocols
Aleksandra Kalinowska, Elnaz Davoodi, Florian Strub, Kory W Mathewson, Ivana Kajic, Michael Bowling, Todd D Murphey, Patrick Pilarski
arXiv, 2022.
Towards situated communication in multi-step interactions: Time is a key pressure in communication emergence
Aleksandra Kalinowska, Elnaz Davoodi, Kory W Mathewson, Todd D Murphey, Patrick Pilarski
Proceedings of the Annual Meeting of the Cognitive Science Society (CogSci), 2022. [ Oral Presentation ]
Communication emergence in a goal-oriented environment: Towards situated communication in multi-step interactions
Aleksandra Kalinowska, Elnaz Davoodi, Kory W Mathewson, Todd D Murphey, Patrick Pilarski
Conference on Reinforcement Learning and Decision Making (RLDM), 2022. [ Oral Presentation; top 4% ]
Situated communication: A solution to over-communication between artificial agents
Aleksandra Kalinowska, Elnaz Davoodi, Florian Strub, Kory W Mathewson, Todd D Murphey, Patrick Pilarski
Emergent Communication Workshop at Int. Conf. on Representation Learning (ICLR), 2022. [ Best Paper ]
Robotic Assessment of Motion Bandwidth Based on a Frequency Decomposition of Movement
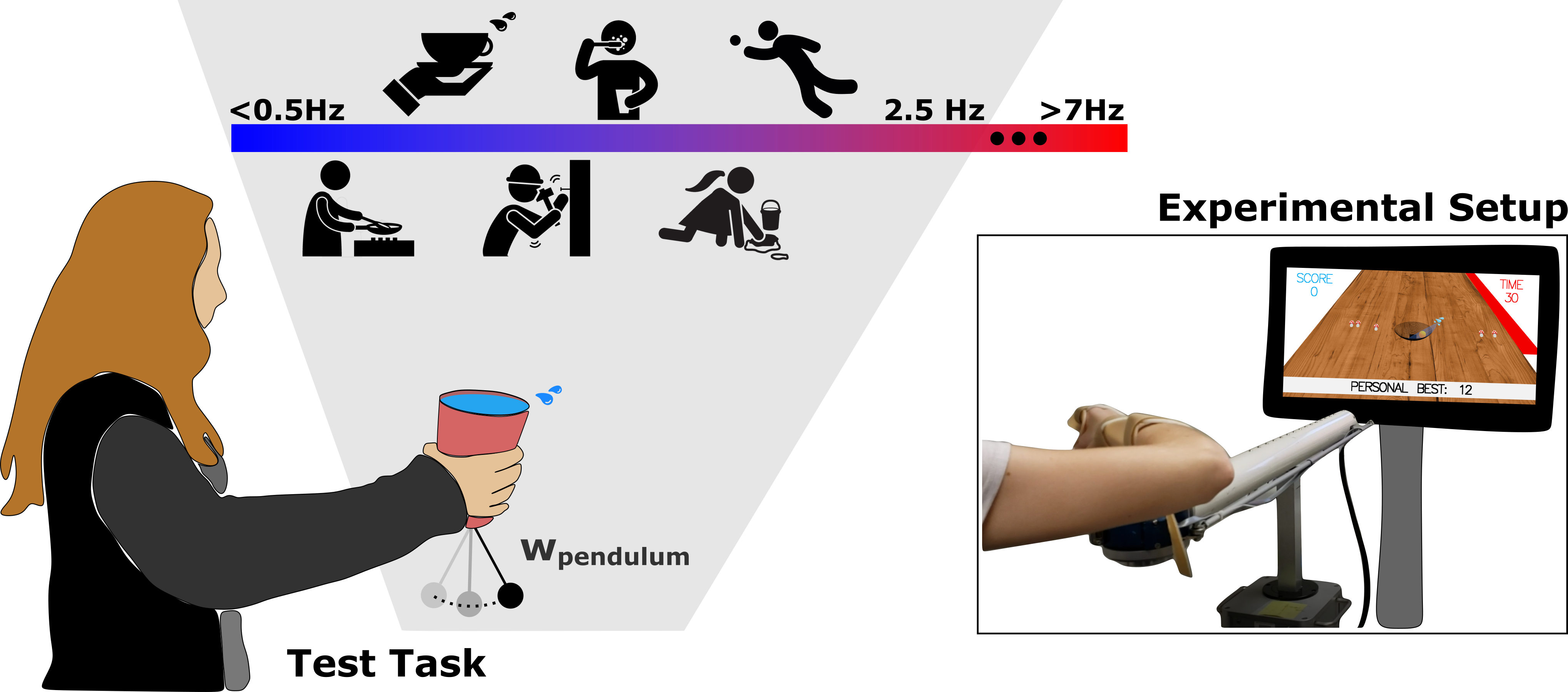
Robots that provide physical assistance for rehabilitation or improved performance depend on the ability to quantitatively assess movement. There is an unmet need for metrics that reliably quantify motion in real time, particularly when the motion is dynamic. In this work, we propose metrics based on the frequency content of movement during timing-sensitive tasks. We validate them in able-bodied and post-stroke individuals, using a set of robot-assisted virtual tasks. By quantifying a person's dynamic response in real time, our method can help assistive robots adapt to an individual during everyday activities, such as brushing teeth, catching a falling object, or moving a cup of water without spilling, improving performance and rehabilitation outcomes.
Related Publications
Quantifying functional loss in neuromotor disorders using robotic assessment of dynamic tasks
Aleksandra Kalinowska, Millicent Schlafly, Kyra Rudy, Julius PA Dewald, Todd D Murphey
in preparation, 2022.
Measuring interaction bandwidth during physical human-robot collaboration
Aleksandra Kalinowska, Millicent Schlafly, Kyra Rudy, Julius PA Dewald, Todd D Murphey
Robotics and Automation Letters (RAL), 2022.
Shoulder abduction loading affects motor coordination in individuals with chronic stroke, informing targeted rehabilitation
Aleksandra Kalinowska, Millicent Schlafly, Kyra Rudy, Kathleen Fitzsimons, Julius PA Dewald, Todd D Murphey
Proceedings of the Int. Conf. on Biomedical Robotics and Mechatronics (BioRob), 2020. [ Oral Presentation ]
Imitation Learning via an Information-Theoretic Analysis of Human Motion
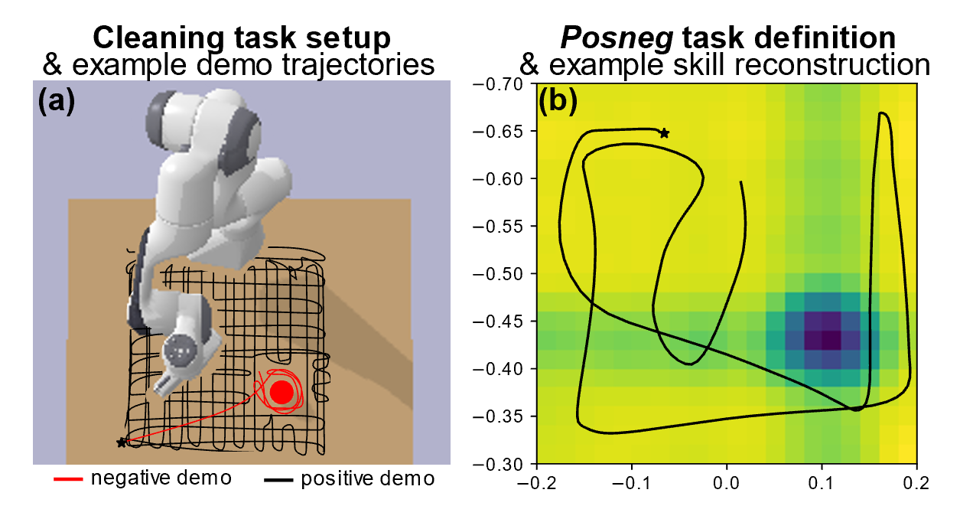
Imitation learning provides a way for autonomous agents to learn new tasks by observing successful task executions. To learn from observation, agents have to interpret motion in the context of a task. Here, we propose two methods for generating representations of a novel task based on movement trajectories. Both methods generate task representations in the state-space without constraining the task solution in time. They are efficient data-driven techniques that enable a low-dimensional model of the task.

Related Publications
Ergodic imitation: Learning from what to do and what not to do
Aleksandra Kalinowska, Ahalya Prabhakar, Kathleen Fitzsimons, Todd D Murphey
Proceedings of the Int. Conf. on Robotics and Automation (ICRA), 2021. [ Oral Presentation ]
Data-driven gait segmentation for walking assistance in a lower-limb assistive device
Aleksandra Kalinowska, Thomas A Berrueta, Adam Zoss, Todd D Murphey
Proceedings of the Int. Conf. on Robotics and Automation (ICRA), 2019.
Sharing Autonomy Using a Model Predictive Controller
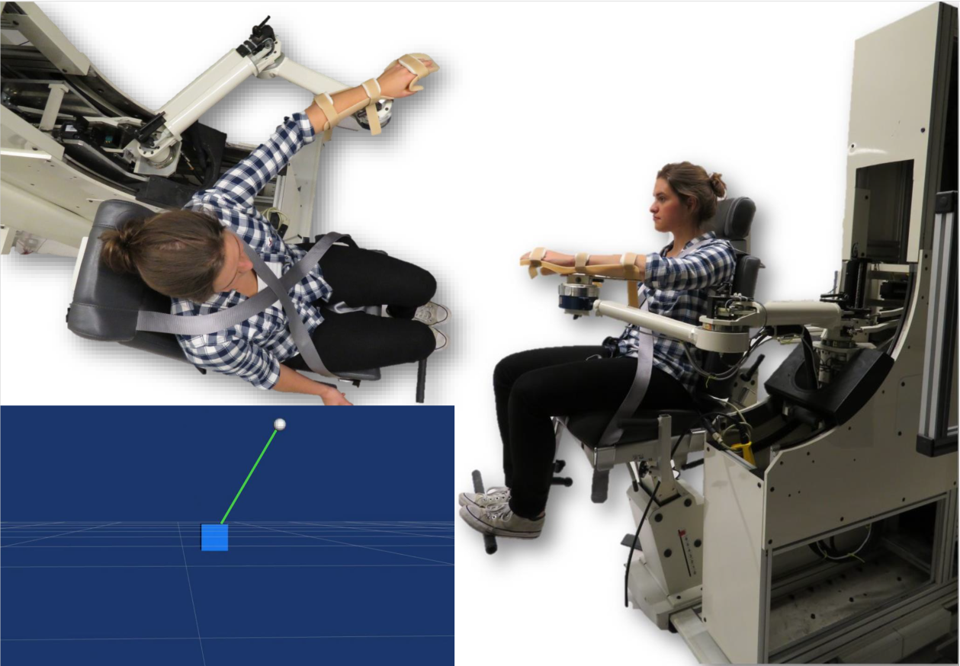
Shared autonomy paradigms distribute control between the human and robot to provide assistance or to enable assisted training. In most cases, there is a desire for the autonomy to guarantee safety and/or improve performance while enabling the human operator to "remain in control", guiding the movement trajectories as much as possible within the constraints of the safety/success of the task. Here, we propose a minimally invasive shared control paradigm based on a predictive assessment of current actions. We show that it enables task training and provides skill-adjusted assistance.

Related Publications
Online user assessment for minimal intervention during task-based robotic assistance
Aleksandra Kalinowska, Kathleen Fitzsimons, Julius PA Dewald, Todd D Murphey
Proceedings of Robotics: Science and Systems (RSS), 2018. [ Oral Presentation ]
Task-based hybrid shared control for training through forceful interactions
Kathleen Fitzsimons, Aleksandra Kalinowska, Julius PA Dewald, Todd D Murphey
Int. Journal on Robotics Research (IJRR), 2019.